Testing
Truefin conducted underwater flutter kicking speed tests with divers utilizing Truefin as well as with premium fins of different manufactures, where the premium fins tested are known for high performance, and while realizing human physical variables exist which are not generally repeatable, and that reproducible swimming technique is difficult to obtain due to the diver’s fatigue during the test. Therefore in order to obtain objective performance data, Truefin also performed machine instrumented flutter kicking tests. During both flutter kicking human speed tests, and flutter kicking machine thrust and efficiency tests, Truefin performed best.
BELOW: Both divers are using Truefin GEN4. The closest diver is utilizing Yellow 415 spines, and the diver in the background is using Blue 412 spines. Note the difference in kick stroke length and kicking frequency. Yellow 415 spines are preferred for long slow flutter kicks, and Blue 412 spines are preferred for short rapid flutter kicks, but the distinction is minor. Yellow spines and Blue spines are proper names of the spines, and the actual color of all spines in this clip are black.

VO2 tests were not conducted, however it is assumed that motor input ‘kicking’ power measured by a torque sensor (measuring ‘simulated muscle exertion’ delivered to the kicked fins) is proportional to oxygen consumption, and therefore the machine efficiency flutter kicking tests which compares Truefin versus different brands of fins are considered by Truefin to be objective efficiency tests. In fact, VO2 tests may show Truefin to have even higher efficiency as compared to spineless or conventional fins than indicated in the test graphs, because higher kicking frequencies were required (requiring higher oxygen consumption) with spineless fins as thrust increased, and the machine torque sensor which measures ‘muscle exertion’ does not factor in kicking frequency (shaft rotation speed).
Truefin only performed informal human frog kicking speed tests, and during such tests divers generally experienced greater glide distances with Truefin as compared to the stiff technical fins tested, particularly if Green spines were installed, but human frog kicking speed tests results are not currently available. Frog kicking execution techniques vary for each individual, and average frog kicking comparison speed results that are repeatable with a group of divers requires extensive testing, and is not really an important test because frog kicking is typically not executed aggressively in the interested of saving air.
Note that Truefin may be optimized for frog kicking by establishing asymmetrical blade flex during the power stroke of a frog kick to compensate for the natural canted ankle rotation limitation of divers, by installing a Green spine at the little toe, and a Blue spine at the big toe (as shown in the photograph at the Home page of this web site), however this configuration is not how Truefin is sold, and requires the user to purchase optional spines, so comparison frog kicking glide distance tests of a customized Truefin versus stiff technical fins will not be performed.
Fins which were generally considered flexible and which have low thrust capability were not tested during flutter or frog kicking.
Human speed tests

ABOVE: Size comparison, new tech Truefin versus old tech.
Kicking Truefin at low frequencies and slow speeds is as comfortable and efficient as any traditional highly flexible fin, while kicking Truefin at high frequencies exceptional thrust was experienced without fin collapse.
Note that although divers with Truefin easily excelled in these subjective human tests when comparing the speed of divers using various premium fins, a couple exceptions occurred where Truefin only had a moderate speed advantage when compared to stiff technical fins when at the limits of the muscle strength of the divers available during the flutter kicking speed tests. However, if a diver has sufficient strength, Truefin will easily outpace all technical ‘stiff’ fins because the blades of such spineless fins will ultimately collapse. Users also indicated more discomfort while kicking hard with stiff technical fins, possibly due to the greater duration of muscle contraction required to flex the relatively rigid rails of stiff technical fins, as well as greater strain on the user’s ankles and/or stress at the medial foot arch due to the non-extended fin platforms of the stiff technical fins tested. It is for this reason that machine testing which plots blade thrust verses input power (muscle exertion) during flutter kicking at different stroke lengths is considered an important objective method when comparing propulsion or speed potential.
Machine flutter kicking tests

Machine efficiency tests of nine different fin models from eight different fin manufacturers as compared to Truefin involved installing a subject fin on an artificial foot/leg, and submerging the fin in a tank water volume while flutter kicking the artificial leg with motor power, and while measuring thrust delivered to an artificial hip joint as a function of power delivered to the kicking fin. The initial set of tests were conducted with Truefin as compared to nine different fin manufacturers and fin models. The magnitude of work performed in the closed system (test tank) was generally proportional to the pressure gradient between the attacking and leeward surfaces of the fin. Power delivered to the artificial kicking leg was measured with a torque sensor at the motor output shaft and correlated with fin thrust measured with a load cell at the artificial hip joint at a wide range of kicking frequencies and at two different flutter kick stroke lengths.
The first series of machine efficiency tests were conducted with Truefin equipped with Green '012' spines and where the mechanical ankle was allowed to pivot 25 degrees. Flutter kicking efficiency comparisons between Green '012 spines versus Blue '412 spines has not been determined as of this date although it is not expected the results would be much different when comparing '012 spines with an ankle that pivots, versus '412 spines with an ankle that is locked, because in both instances during the flutter return kick a propulsive angle of attack occurs.
Most tests were subsequently conducted with '412 spines with the mechanical ankle locked because having an ankle locked reduces test variables, and under this test condition all fins were allowed to produce an angle of attack during the machine flutter power kick and the machine flutter return kick. Furthermore, it is thought that during real world 'short term' kicking efforts, an argument may be made that the mechanical ankle should be locked because during aggressive flutter kicking there is insufficient time for users to relax their ankle prior to the return stroke, but rather the user tends to generally maintain a rigid ankle while trying to achieve maximum speed. Having said that, note that if the fin is equipped with '012 spines, then if the user has sufficient strength significant propulsion can be developed by the user while the user flexes their ankle somewhat in a yielding manner during the flutter return kick.
Blue '412 spines are currently considered to be the best compromise for most users and therefore are the standard spines shipped with Truefin. There is active consideration to make Yellow spines the standard spines to be shipped with Truefin based upon a consensus of user input. Green '012 spines are optimized for frog kicking, and Yellow '415 spines are designed to provide the easiest flutter kicking experience although Yellow '415 spines may require a higher flutter kicking frequency or a greater flutter kicking stroke length as compared to Blue '412 or Green '012 spines for a given propulsion speed. If a user has sufficient strength during a flutter return kick, then Green '012 spines may provide more flutter kicking thrust then Blue '412 spines due to thrust forces generated during the flutter return kick. Few users have sufficient muscle strength to notice much difference between Blue '412 spines versus Green '012 spines while flutter kicking.
The user may customize the fin to have the inside spine (Blue spine at Big toe) and outside spine (Green spine at little toe) - (thereby creating a right and left fin) flex asymmetrically during canted frog kicking.
The live graph above is a start-up screen shot as the controller ramps up the speed while testing the efficiency of Truefin while flutter kicking.
An interesting and relatively sophisticated test apparatus known as HERMES (Hydrodynamic Equipment for Research on Mechanical Deficiency of Swim-fins) (A new system for analyzing swim fin propulsion based on human kinematic data - Journal of Biomechanics, 2010, Nicolas, Bideau, Colobert, Guerroue, and Delamarche)
https://www.sciencedirect.com/science/article/abs/pii/S0021929010001764
found that traditional fins having rails or ribs having flexural stiffness which may be approximated as thin elastic beams according to Euler Bernoulli's method had efficiencies ranging from 45% - 70% at Strouhal numbers around 0.35 depending upon the fin. Generally, long freediving fins had the highest efficiencies and shorter fins had the lowest efficiencies. Such studies do not include a fin such as Truefin (Truefin did not exist) where the rails or ribs do not have bending characteristics which behave as a thin elastic beam, but rather the Truefin blade may readily flex up to a rigidly enforced blade angle of attack which occurs upon collision of surfaces between successive vertebrae of the Truefin artificial spines. In the HERMES apparatus, sensors are provided to measure various parameters while a carriage (having minimal projected area) is propelled through the water due to thrust generated at the fin. As indicated above, the Truefin test apparatus measured effective thrust by a load cell at the main pivot of a mechanical leg while a fin is kicked by an electric motor (without a moving carriage) at two different kicking amplitudes (swept tip at 27 inches and 36 inches), and the thrust value is correlated with both input power measured with a torque sensor, and kicking frequency variably changed with controller.
Historically, comparative machine efficiency testing data of swim fins from different manufactures is either not made available, or the industry in general simply does not conduct such objective machine tests. It is known that at least one swim fin manufacturing company has a test apparatus which also includes a motorized kicking mechanism installed on a carriage which is propelled through a tank due to fin thrust forces, but test data indicating motor input power versus thrust or carriage speed while determining efficiency between different fin manufactures is not available. Also, Technisub of Cressi Rondine fins mechanically tested fins around 1980, but again no testing data is available. Numerous subjective tests with humans have been performed, however such tests are generally not reliable because as Nicolas et al. indicates "a reproducible swimming technique is difficult (or impossible) to obtain on a human body and lead to discrepancies in data acquired between trials."
Regarding the Truefin machine efficiency test results, all tests were conducted and reports prepared by an independent engineering consulting company (Nualach Design & Engineering LLC, Sandy, Oregon).
With Truefin, if the user has sufficient strength, machine test results indicate Truefin will produce greater thrust at given kicking frequencies as compared to all other traditional (spineless) fins on the market.
A realistic maximum kicking (muscle exertion) power of divers is estimated by Truefin to be up to 700 Watts (0.70 kW), and therefore the upper limit of the comparison graphs of different fin manufacturers is 700 watts INNOVATION/COMPARISONS (PDF), although note that powerful kickers may be able to exert over 1,000 watts for brief periods of time. In any event, many humans are capable of exerting 700 watts, particularly during fight-or-flight responses when an adrenaline rush may be experienced underwater during emergency situations. Generally, in such situations, or when propulsion is needed most during an emergency for example, spineless fins collapse or 'go flat'. Note that the spines of Truefin are very robust and easily handle the kicking loads of all divers, and are engineered to assure high endurance life of the artificial vertebrae during cyclic loads, and where the endurance life of the spines easily exceeds 1,000,000 powerful kicks in water. Spines are warrantied against breakage with the Truefin limited lifetime warranty.
To quantify the power a human may exert, consider an example or common experience people may relate to when climbing a ladder, where if a person having a mass of 100 kilograms climbs a three meter high ladder in four seconds, then that person has exerted about 700 watts of power.
To verify with calculations, note power is mass times acceleration due to gravity, times height, divided by the time it takes to lift the object to the given height.
In this example of climbing a ladder:
1 Watt = 1 Joules/sec = 1 Newton*meter/sec
mass = 100 kg
gravitational constant = 9.8 m/s2
height = 3 meters
time = 4 seconds
Joules = (100kg)*(9.8)*(3 meters) = 2,940 Joules
2,940 Joules / 4 seconds = 735 Watts
735 Watts = 0.985 horsepower
The above calculations illustrate an exceptional example of human power, and demonstrate that fins having Truefin spines which will not collapse - offer a high speed advantage for propulsion during high levels of exertion, however the average human may only be able to, or only wish to deliver 100 Watts of power during scuba diving, and in this latter instance the highly flexible nature of the Truefin blade (the artificial spines articulate with zero resistance) up to the condition of the spine vertebrae colliding, results in a very easy, low stress kicking experience while providing very good velocity because muscle exertion (efficiency) is not wasted flexing self dampening solid rubber, synthetic rubber, urethane, or other elastomeric compounds of fin rails of traditional spineless fins. The reader is reminded that the user of traditional fins first has to load up the 'rail spring' at the beginning of the kick stroke which takes energy away from the diver, followed by the 'rail spring' returning energy to the diver's kick at the end of the kick stroke, which is a net zero in overall energy expenditure in a given kick cycle while the rail spring is loaded and then unloaded [refer to INNOVATION/INTRODUCTION]. Furthermore, the relaxation modulus (Re) or ‘snap’ has not shown to offer a benefit during Truefin machine tests of spineless fins, where in at least one case of such a fin constructed of urethane having extremely high ‘snap’ material characteristics had significantly less thrust and efficiency as compared to Truefin. [refer to INNOVATION/COMPARISONS (PDF)] As previously indicated, ‘snap’ (Re) may offer a benefit for very long freediving fins. Note that Truefin has not tested efficiency of freediving fins, but freediving fins are generally more efficient than spineless scuba and snorkeling fins.
Traditional (spineless) fins tested are defined as fins having a flexible blade connected to a foot pocket, and excludes long free diving fins. It may be noted that some of the stiff traditional fins (technical fins) tested had a very good 'angle of attack' at high kicking effort and had diver speeds approaching Truefin, however during swimming tests the divers who tested these available 'stiff' technical fins found them uncomfortable and strenuous to use at high kicking frequencies. The cause of the discomfort or strain on the user's ankle when kicking a stiff fin may be explained upon examination of the data graphical wave form during a single high speed power flutter kick, where with a stiff spineless technical fin a longer duration of muscle exertion occurs as the user exerts significant energy flexing the self dampening rubber or elastomeric 'stiff' fin rails toward a blade angle of attack, versus with Truefin where the artificial spines easily articulate up to the optimum angle of attack and all ankle strain of a Truefin user is due primarily to the generation of propulsive forces after the fin blade angle of attack has been rigidly enforced by the artificial spines. In this manner the machine tests conducted by Truefin do not reveal the level of strain on a users ankle while kicking stiff technical fins, and more machine testing with higher sampling rates are required in order to explain the discomfort experienced while kicking a stiff technical spineless fin, and such research should include better resolution of the data at high kicking frequencies to determine whether or not duration of muscle exertion in a given flutter kick cycle is the correct explanation as to why Truefin is more efficient and therefore a more comfortable and easier fin to kick. Including an additional strain sensor at the mechanical ankle is also advised to measure what is anticipated to be higher ankle stress while flutter kicking a stiff technical fin.
Also note that the speed capability of stiff (spineless) fins at high kicking effort comes at the sacrifice of causing muscle fatigue or muscle cramps at slow kicking speeds because the blade of a traditional 'stiff' fin does not readily flex, and has an inefficient minimal 'angle of attack' at slow kicking frequencies. Consequently, muscle fatigue or muscle cramps more likely occurs with traditional stiff fins versus Truefin at any given propulsion speed.
As indicated above, Truefin is designed to be efficient at all kicking frequencies, and traditional fins on the market are only most efficient at a single given kicking frequency while such fins are producing the optimum 'angle of attack'. Freediving fins having very long blades are highly efficient, and were not machine tested or diver tested and are currently beyond the scope of Truefin testing.
During machine testing in the Truefin test apparatus, at high kicking frequencies all fins with the exception of Truefin will ultimately become highly inefficient and collapse or 'go flat' as kicking frequency is increased.
An example of machine testing (mechanical leg reciprocates @ 25 degrees - mechanical ankle unlocked and free to pivot 'toe up' up to 30 degrees) of Truefin 'Gen 3' with '012' spines versus Brand A (a very popular stiff 'hinged' fin size Large of modern design with retail cost over $240) is shown in the two graphs below. In the first graph thrust versus kicking frequency is plotted. Note that generally Truefin produced twice the thrust at a given kicking frequency.
In the second graph below, fin thrust is plotted against muscle exertion for Truefin versus Brand A. As shown, at a given level of muscle exertion more thrust is generated with Truefin versus Brand A. Brand A ultimately collapses, and kicking Brand A faster and faster produces diminishing additional thrust. In fact, the torque sensor at the output shaft of the motor senses essentially zero additional torque delivered to the fin after the Brand A fin blade has fully collapsed or gone flat, and as the motor speed continues to increase. The reader will note that this implies that if a user is kicking a spineless fin, there is diminishing benefit to kick faster after the fin has begun to collapse, and such effort will only result in higher consumption of oxygen.
Also note when referring to the second graph below, that generally at a given level of muscle exertion more fin propulsive thrust is provided by Truefin versus the Brand A fin. Brand A performed similarly to many of the conventional (spineless) fins tested. Additional thrust and efficiency tests will be performed in an ongoing manner, and will include Truefin compared against the most expensive and highest quality technical fins available, as well as other spineless fins which are relatively stiff, vented, and/or split, and where such fins are known to have above average performance. Future performance curves of spineless fins however are expected to be very similar to the numerous spineless fin samples tested to date.
Graphical representation of the advantage of a spine:




It should be noted that some of the torque ( ~ 15-20% ? update - data lost ) measured at the torque sensor was due to friction losses in the drive components such as roller bearings and synchronous belts. In order to determine the power loss in the drive components, the water was removed and the mechanical leg kicked at frequencies 1-90 kicks per minute while measuring torque delivered to the drive system with the torque sensor, and power loss due to friction was calculated accordingly. The power which is absorbed by the drive components at different kicking frequencies and as measured by the torque sensor is available here not currently available.
The Truefin test apparatus used the same fin stroke for the test above, and a controller ramps up the variable kicking frequency at the same rate for all tests. The stroke length will be increased about twenty five percent during subsequent tests (update: 7/2020 - tests having swept tip strokes of 27 inches and 36 inches have been completed, please refer to INNOVATION/COMPARISONS (PDF). At this time Truefin is compiling data, and the above test is just one example and is considered generally representative of spineless fins versus Truefin. Data was not collected above 90 kicks per minute due to premature blade collapse of traditional fins, as well as excessive turbulence and bubble entrainment in the limited tank volume, as well as motor (1 hp) overload conditions being generated with Truefin at higher kicking frequencies. Also, there is no need to design a fin to be optimized for high kicking frequencies because it would be an unnatural and demanding frequency for sustained operation, where for example frequencies of 60 kicks per minute (1.0 Hz) have been suggested as the optimum rate for Type 1 muscle fibers (in cycling; Sargeant and Jones, 1995).
Maximum Speed 115 kicks/minute

Upon review of the general machine test data of fin thrust versus input power for all fins tested, one can conclude that generally greater propulsion thrust at a given amount of muscle exertion occurs with Truefin versus traditional fins. For example, by inference at 0.20kw or 0.27 horsepower exerted by a single leg of the user, the premium Brand A of a single fin would develop 13.8 pounds of thrust, while at the same horsepower a single fin of Truefin would develop 22.4 pounds of thrust where Truefin is at least 62% more efficient. In all other examples of traditional fins tested, the thrust of spineless fins was generally always less than the thrust of Truefin at a given horsepower. The machine data perhaps yields the best approximation of efficiency of fins tested, however oxygen consumption tests would be advisable to help determine fin efficiency, and such tests have not been performed by Truefin as of this date (1/2020). Also note that thrust and horsepower would be doubled if two fins (corresponding to two legs) were kicked simultaneously.
Testing Data and Test Videos - Truefin Model 110
This section is incomplete. All testing and compiling of data of Gen4 has not been completed. Refer to test results below, or download: [COMPARISON (PDF)] which compared Truefin Gen3 Model 110 Size Large to these nine open heel size Large fins:
1] BRAND A - Modern high tech (relatively stiff - hinged) scuba fin paddle design – approximate retail cost $240 (Brand 'A')
2] BRAND B - Highest performing split fin – approximate retail cost $200
3] BRAND C - Modern high tech scuba fin paddle design – approximate retail cost $190
4] BRAND D - Modern high tech scuba fin paddle design – approximate retail cost $100
5] BRAND E - Modern high tech scuba fin paddle design – approximate retail cost $90
6] BRAND F - High tech scuba fin approximate retail cost $260
7] BRAND G - Very stiff paddle style technical fin – approximate retail cost $180
8] BRAND H - Very stiff paddle style technical fin – approximate retail cost $165
9] BRAND I - Very stiff paddle style technical fin – approximate retail cost $60
Brand identities available by special request
The following graphs were prepared and submitted by Nualach Design & Engineering LLC, Sandy, Oregon USA
ALL TESTS BELOW WERE CONDUCTED WITH TRUEFIN Gen3 WITH ‘412 BLUE SPINES INTALLED. Current production is Truefin Gen4 which has a more streamlined foot pocket and has a molded Monprene toe down blade angle of twelve degrees versus Truefin Gen3 which had a less streamlined foot pocket and had a molded Monprene toe down angle of seven degrees. Gen4 has better performance as compared to Gen3 (Note that Gen3 was never produced).



Determination of Fin Efficiency During Machine Testing
For all fins machine tested, the kick stroke length of the artificial foot during a given testing session was constant. Note that some fins such as split fins may perform better with a very short kick stroke at very high kicking frequencies, and the maximum kicking frequency of the test apparatus is limited to 115 kicks per minute, so the test results may not be demonstrating the optimum performance of all fins tested, however all fins would generally benefit during high frequency kicking if the blade flex is not excessive.
The scope of the testing was relatively narrow and involved measuring thrust as a function of input power while the fin was flutter kicked at both 27 inch swept blade tip length and 36 inch swept blade tip length at kicking frequencies ranging from 0-100 kicks per minute.
In the opinion of Truefin, the automatically accumulated machine testing data derived from a test tank apparatus which includes a motor torque sensor which is correlated with a load cell that measures fin thrust at different kicking frequencies, supports the conclusion that Truefin Model 110 demonstrated the highest overall propulsive efficiency of all fins tested during a machine simulated flutter kick. In this regard, note in the example graph above of Truefin versus Brand A (Pounds Fin Thrust versus motor output delivered in KW and measured with a torque sensor) that Truefin generally demonstrated greater fin thrust at a given motor torque sensed at the motor output shaft.
The factors listed below were not tested, although subjective opinions indicate Truefin would perform satisfactorily in each of the following:
Ease of Donning, adjusting, and removing fin
Overall comfort
Stability (wobble, slice side to side, or strike each other while kicking)
Maneuverability
Surface swimming capability
Machine Testing
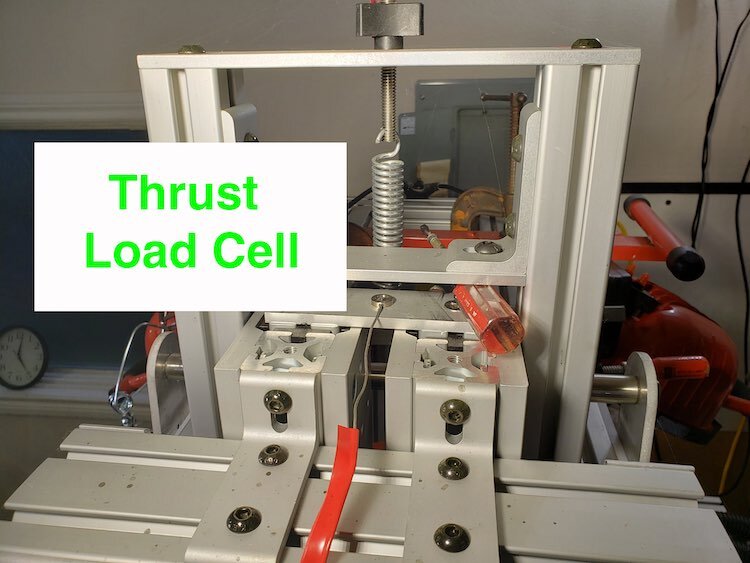
The testing apparatus consists of a one horsepower motor which reciprocates a mechanical leg at variable frequencies, and where during efficiency tests the mechanical leg has an mechanical ankle which may be locked or unlocked, and where if the mechanical ankle was unlocked it would be free to pivot 'toe up' within a predetermined angular range during the return kick stroke, while being slightly spring biased toward a preset 'toe down' foot orientation stop limit. Refer to specific test parameters in order to determine if the ankle was locked or unlocked during a given efficiency test. All endurance tests are/were conducted with the mechanical ankle locked. A 3D printed plastic foot was secured to the ankle member and immersed in a 4'x4'x4' cubic tank (64 cubic feet) filled with fresh water. During efficiency tests a torque sensor was installed at the motor output shaft and a load cell was installed at the mechanical leg to measure input power and thrust respectively. The test apparatus was utilized to compare efficiency of a group of fins, and the test apparatus was also utilized to endurance test Truefin.





The limited water volume in this test tank apparatus creates significant turbulence at high kicking frequencies which may have a noticeable effect in the thrust data generated. For example, during tank wave resonance at approximately 55 kicks per minute, thrust data declined when water movement in the tank moved in phase with a kicking fin and while water was being splashed over the tank rim. Conversely, when water moved out of phase and collided with a kicking fin the thrust values detected at the load cell increased. Both of these instances are noticeable in the graphical representations of the test data at around 55 kicks/minute, and an example of hard data is here (not currently available). Also note that at high kicking frequencies bubble entrainment becomes a concern, and it is possible thrust values decreased slightly due to a reduction in the density of the fluid in the tank. This phenomenon only occurred with Truefin at 80 kicks per minute and higher. Note that water was added to the tank as required in order to replenish any water that splashed out of the tank.
Also note that the tip of the fin 'sweeps' within six inches of the bottom of the tank, which may also effect the thrust test data as well as the endurance test data, while imposing a resistance barrier to the natural flow of water off of the fin blade during higher kicking frequencies. Due to such close proximity of the trailing edge of the blade to the bottom of the tank, vortices are not allowed to fully form and the thrust would be similar to the thrust generated when kicking away from an immovable object.
Regarding endurance tests conducted with Truefin, both the turbulence in the tank and the proximity of the fin blade tip adjacent to the tank bottom creates higher or worst case forces on the artificial spines then would be experienced in an open body of water, and in that respect endurance/fatigue test results of Truefin are considered conservative estimates. Furthermore, during initial endurance tests the mechanical ankle was locked which again is a worst case situation. During some of the efficiency tests the mechanical ankle was allowed to freely pivot during the return stroke twenty five degrees (25°) which is considered a close approximation to the rotation of a human ankle during real life propulsion conditions while flutter kicking at low to moderate kicking frequencies.
In the future, instrumentation may be installed on a small boat in order for motor driven open water laminar flow fin flutter kicking to occur, which would more accurately simulate thrust in real world conditions. Such a test apparatus would also be helpful during endurance/fatigue tests of Truefin. In any event, the spines have a lifetime limited warranty against breakage, so such information is only to improve the spines of Truefin to the maximum extent technology makes possible, while trading cost versus benefit. Currently the spines are 30% glass filled Nylon 612, and if Truefin learns of spines breaking than 30% carbon fiber filled Nylon may be utilized to support the lifetime guaranty.
Truefin machine test results attempt to objectively compare efficiency between various fins, and the user can decide whether the data provided is meaningful, and whether or not there are more important factors to consider before purchasing a set of fins. In the opinion of Truefin, the automatically accumulated machine testing data derived from a test tank apparatus which includes a motor torque sensor which is correlated with a load cell that measures fin thrust at different kicking frequencies and different stroke lengths supports the conclusion that generally Truefin Model 110 demonstrated the highest thrust and overall propulsive efficiency of all fins tested during a machine simulated flutter kick (please refer to INNOVATION/COMPARISONS (PDF) downloadable file).
Test Tank Equipment
Motor – Marathon – microMAX AC Inverter-Duty Motor, 1 hp
Controller – Automation Direct – GS2 Series AC Drive
Torque sensor – FUTEK - Rotary Torque Sensor – TRD/TRH/TRS 600/605/705 Series
Adapter – FUTEK – Model USB520 – External USB Kit (mV/V, amplified and encoder input)
Load cell – FUTEK Model LLB350 – Miniature Load Button
Software – SENSIT by FUTEK – Version 2.2.4000.0
Efficiency Tests
The custom built machine test apparatus utilized during development of Truefin is capable of 0-115 kicks per minute and is rated at one horsepower. A mechanical leg reciprocates through thirty degrees (30°), and a 3d printed foot translates 20 inches, with a sweeping arc at the tip of the fin blade approximately 36 inches long depending upon the length of the test subject fin blade. A mechanical ankle is pivotally secured between the mechanical leg and the foot, where the mechanical ankle has an adjustable pivot range which is allowed to pivot during thrust and efficiency tests, however during endurance tests the mechanical ankle is locked to the mechanical leg in order to create abnormally high artificial spine loads as a worst case scenario.
During the motor driven tests, for a given flutter kick stroke length the instantaneous output motor power versus propulsive thrust generated is plotted at a wide range of kicking frequencies. Maximum kicking frequency during data collection was limited to 100 kicks per minute.
During machine testing, as the kicking frequency was increased the fin blades of all traditional stiff fins as well as all traditional flexible fins flexed significantly, or collapsed and 'went flat'. Typically, this phenomena occurred at elevated kicking frequencies for these spineless fins where upon as the fin blade collapsed the thrust forces generated only marginally increased as the kicking frequency increased.
With Truefin, testing indicated that thrust increased with kick frequency in a somewhat linear manner. The artificial spines of Truefin theoretically would continue to provide increased thrust until cavitation occurs or spine breakage occurs. A limitation of the test tank apparatus currently used results in high turbulence and bubble entrainment in the tank water volume when Truefin Model 110 kicking speed exceeded 90 kicks per minute. At these relatively high kicking frequencies of Truefin it is thought that thrust forces would be further improved if there were fewer bubbles in the water, and future open water tests may be conducted to propel a small boat where bubble entrainment can be eliminated and where the test would be economical to perform and not require a large pool test apparatus.
Stress Tests
In addition to efficiency testing of Truefin with the test tank, the test tank was also utilized for stress testing spines at kicking frequencies up to 115 kicks per minute. The below motion file is a startup of a 90 kicks/minute test with a fin equipped with 3D printed '012' Green Spines (colored white) with the mechanical ankle locked.

Endurance Tests
Machine flutter kicking endurance tests were conducted with Green '012' spines and with the mechanical ankle locked, which is a worse case situation because the Green (Green spines are optimized for frog kicking) artificial spines are straight during the flutter return stroke (while the mechanical ankle is locked). Truefin is expected to repeatably survive at least 1,000,000 kicks at 60 kicks per minute in the test tank apparatus with the present injection molded nylon glass filled spines, and that why Truefin confidently provides a limited lifetime warranty. Endurance tests are time consuming and require 300 hours of supervised machine operation.
Bench Break Test
Prior to physical testing, spine geometry was evaluated through several iterations with Finite Element Analysis (FEA). Below is an example of FEA performed with the initial spine geometry.

In addition to endurance or fatigue tests, bending moment break tests (bench tests) were also performed.

The above was an early (Gen 2) bench test of a 3D printed head and socket region (the intermediate region of the vertebra was not the subject of this test). Note in this early test the head and socket region did not fail, and the forks did not spread causing the head to pop out of the socket, but rather the supporting structure at the base of the forks adjacent to the metal test fixture failed. This was not a surprise and is a credit to the accuracy of FEA. Subsequently the intermediate region of the vertebrae was optimized geometrically for strength.
The above break test (Gen 4) of injection molded glass filled vertebrae was unsuccessful (fixture failure).
The bending moment break tests indicate that when the spine is rigidly supported at the base link (part number 10000), a new spine is rated at approximately NA inch pounds (not yet determined).
ENDURANCE TESTS (PART 2)
Note: A bench break test does not simulate real world stresses on the spine because when the fin is kicked in water the spine is stressed in a distributed manner along the length of the blade and spines, and that is why the water tank machine flutter kicking tests are important to test the strength and endurance of the spines (in addition to using the machine to test for thrust and efficiency). Unfortunately, it can take well over a month to conduct endurance tests during supervised testing to one million cycles, as we continue to test different spine materials at ever increasing machine kicking frequencies. Truefin passed one million flutter kicking cycles at 40 kicks/minute, and we are now testing at 60 kicks per minute. All spines (and the Monprene fin) have a lifetime guarantee.

ABOVE: The machine endurance test of the spines tends instead to be an endurance test of the machine components. We have broken the stainless steel leg twice in different parts, and keep redesigning it to be stronger to eliminate fatigue failure of the mechanical leg, while keeping the mechanical leg as light as possible.

ABOVE: 1/4” stainless steel foot bracket that does not include an ankle pivot - currently being used for endurance testing at 61 kpm (spines were molded a darker blue color).
BELOW: Real time video while endurance testing Truefin with Green spines at 61 kicks per minute.
EDIT NOTE - Reorganize web site spine stress tests and endurance tests.
Note: Due to predetermined opposed design draft angles at each of the socket/head joints (which also facilitates 3D scooping), and the smooth surfaces of the injection molded vertebrae, during abnormal and very high bending moments such as would be expected while prying the spine against an immovable object for example, one or more artificial vertebra links are intentionally designed and expected to side slip out of position without causing damage. This feature makes it difficult to determine the value of the bending moment required to break a spine. In order to perform an instrumented successful break test the spine must be fully laterally and rigidly captured in order to prevent the designed side slip, and such a test would not simulate real world conditions because in use the spine is captured with flexible pass core bands which minimize the likelihood of lateral side slip at abnormally high loads, and also the pass core bands exert reinforcing compression force against the vertebra 'forks'. This synergistic relationship between the fin pass core bands and the spine vertebrae, where both vertebrae fork compression and band side slip containment increases as fork compression increases (band tightening), makes it very difficult to quantify the ‘real world’ bending moment capability of the spine. Also, in ‘real world’ conditions two spines are cooperating together while 3D scooping is occurring which tends to cause spine convergence, which again makes it difficult to test ‘real world’ conditions. Practically, the top of the foot pocket would be expected to deform causing the foot to move out of the foot pocket before a spine breaks. All Truefin components, with the exception of the heel strap, have a limited lifetime warranty.
Tests indicate that the spines will never break (or sideslip) if the spines are simply subjected to a human flutter or frog kicking the fin in water, however it is to be understood that breakage of the artificial vertebra may occur during accident or non typical use because they are made of plastic (high strength glass filled nylon 612). If one of the two spines of a given fin breaks, the single intact spine remaining will enable the fin to perform similar to a traditional 'moderately stiff' fin, and even with both spines broken at a fin, Truefin may perform similar to a traditional flexible fin.
The artificial spines have had the vertebrae geometry optimized with FEA (Finite Element Analysis), and also endurance tested in the Truefin tank test apparatus, in order to produce a highly technical spine which will provide a lifetime of service while minimizing cost. Having said that, it should be pointed out that the user should avoid prying or kicking the spine(s) against an immovable object both in water or on land. As indicated above, during such abnormal load events, the Truefin spine is designed to slide laterally apart (typically vertebra 50XXX or 60XXX) while temporarily deforming the Monprene bands during such overload conditions, and no damage occurs. If this happens, the spine may have to be removed from the fin, reassembled, and installed back into the fin.
With regard to the durability of the elastomeric properties of Truefin (currently Monprene), and to demonstrate that removing the spines and folding Truefin during travel is not an issue, Truefin has parked a truck on a folded fin with no functional damage to the fin blade and passcore regions of the fin. For a video of this test truck tire on folded Truefin

Truefin has been tested with divers and also been subjected to machine endurance tests, however a significant number of scuba diving hours may be required to fully understand the extended service life of Truefin. Considering that the spines of Truefin have a lifetime guarantee, if Truefin determines that an upgrade of the mechanical properties of the spines is justified then carbon fiber filled nylon (31,000psi tensile) may be utilized instead of glass filled nylon (21,000psi tensile), but at this time such a change (with the increased cost) does not appear to be necessary. All Truefin components, with the exception of the heel strap, have a limited lifetime warranty.

Your soul is so bohemian, free, and gypsy wild. Come swim with me in the calming sea, let’s be mermaids for a while. Melody Lee, Moon Gypsy
Mermaid artist: Jennifer Johnson
Research pending:
https://apps.dtic.mil/sti/pdfs/AD0780665.pdf
https://sci-hub.se/10.1098/rspb.1971.0085
https://www.sciencedirect.com/science/article/abs/pii/S0889974603001749
https://www.sciencedirect.com/science/article/abs/pii/S0142727X16302636
https://www.nasemore.com/an-automated-system-for-analysing-swim-fins-effi-ciency/
https://enstrophy.mae.ufl.edu/publications/MyPapers/2019_DeVoria_JFM_EntrainmentSheet.pdf