Efficiency & Geometry
BELOW: Extensive machine tests of Truefin GEN3 (not manufactured) were conducted in order optimize the dynamic geometry of Truefin to produce greater thrust and efficiency as compared to all conventional (spineless) fins available on the market. Test results of current production Truefin GEN4 are pending, where GEN4 is further refined and optimized over GEN3. Refer to TESTING

High efficiency of operation in the case where scuba fins are studied ultimately correlates with the greatest distance traveled under water while consuming the least amount of air.

When designing a swim fin, an optimum angle of attack is generally around forty five degrees (45°). The standard '412 Blue spines of Truefin articulate sixty degrees (60°) during the flutter power stroke, and this generally correlates to an effective angle of attack of forty five degrees (45°) due to the dynamic orientation of the fin while moving forward in the water streamline while kicking at a moderate velocity.
Note that when studying fish such as carangiform and thunniform swimmers, an ideal angle of attack of from 10°–20° through much of the power stroke is the most efficient. [ The Diversity of Fishes / Gene Helfman . . . [et al.]] – 2nd ed. PDF file (file size - 42MB) - link: Diversity of Fishes - Refer to page 114 of 720.
With a human wearing fins on feet, having such an angle of attack may be advantageous when kicking extremely hard and while having high velocity through water, however such an effort is not sustainable, and that is why typically the dynamic angle of attack for swim fins is preferably around 45 degrees for the average swimmer.
To expand on this further, when stiff technical fins are kicked, only moderate kicking frequencies are generally possible while at high exertion levels of the lower body. During flutter kicking, stiff technical fins only work well when kicked hard. On the other hand, with Truefin the optimum angle of attack is enforced with artificial spines which generally enables a higher kicking frequency with less lower body effort while at higher thrust values than possible with stiff technical fins. A diver with Truefin can swim faster and requires less effort, whereas although a diver with stiff technical fins may be able to approach the water speed of a diver using Truefins, during such high water speeds the diver with stiff technical fins has an insufficient angle of attack - which therefore requires more ‘leg torque’ to move the same amount of water, and this causes higher loads on leg/hip muscles and knees.
The foregoing paragraph, as of this date 11/2022, seems to be the only reasonable explanation as to why users of Truefin experience greater efficiency and less fatigue, but Truefin acknowledges other factors may be important, such as higher strain on user’s ankles when using stiff technical fins, and/or insufficient platform area of a stiff technical fin which causes increased stress at the medial arch of foot. Furthermore, with Truefin the diver does not expend energy bending stiff self dampening elastomeric fin rails. As time passes if a more reasonable explanation becomes known it will be offered for further discussion. Truefin sincerely welcomes input from divers, kinesthesiologists, or anyone with greater understanding, to help explain this matter. Truefin may be reached at info@truefin.com and this web site will be updated if there is a change in understanding why Truefin generates less fatigue and more thrust than a stiff technical fin.
For an additional perspective regarding the combat swimmer stroke (CSS) while using stiff technical fins, refer to https://www.stewsmithfitness.com/ , and in particular a Youtube video by Stew Smith https://www.youtube.com/watch?v=-OsjHIM2xeo&t=115s at time 1:14, where in some instances divers may be able to swim faster without fins than while wearing stiff technical fins. A point was further made that stiff technical fins may work best in currents, rather than at speed in calm water. As previous comparative tests have been indicated to demonstrate, a swimmer would typically find similar results when comparing time to swim the side stroke without fins for 500-1000 meters versus swimming the same distance with fins in a 25 yard or meter pool.
In order to encourage further research of swim fin design, and to provide an opportune time to have Truefin’s performance verified by state level entities, Truefin offers to ship the Truefin test tank and mechanical apparatus (with an upgraded 2hp motor and controller) including laptop and software at Truefin’s expense, in addition to Truefin fins as well as approximately thirty five different brands and/or models of fins from different manufacturers currently in Truefin’s inventory, to a qualified governmental entity or university, if further study and testing is desired to gather additional data correlating thrust versus efficiency during flutter kicking (Refer to example data at INNOVATION/COMPARISONS (PDF)) of Truefin versus any other fin design, provided that all test data results be made publicly available. Contact info@truefin.com for more info.
Subjective comments from different divers below are unedited, and pertain to the efficiency and thrust experienced with Truefin (refer to REVIEWS at Truefin.com for full context):
Diver A - "One thing I found during my flutter kick was that it was easier to keep my knees completely straight and generate all the kicking power from my hips. Most fins I generally feel the need to slightly bend my knees while flutter-kicking to prevent too much fatigue”... ...”After the 86 minute dive in moderate current, I felt very little fatigue in my legs, hips, and ankles.” ... “Most importantly, I didn’t have the same hip-flexor fatigue that accompanies kicking in my heavy F1 fins."
Diver B - "It is incredible how much more thrust these give on the back stroke when they lock up. I put enough time on them I was sure I was going to be sore but was just fine the next day."
Diver C - "I've used a lot of different fins in those situations, but can't believe how effortless these fins feel in comparison. This feels especially noticeable when accelerating, while still allowing amazing agility."
Diver D - "No hotspots and tons of power with less effort."
Diver E - "I experienced more bang for my Buck with each kick and my legs felt less fatigued." ... "As an SDI Divemaster I find it important to cover distance quickly. This Fin did not disappoint. I next swapped over to the yellow Spines. These were noticeably easier in the flutter but not quite as powerful. Like with the Blue I felt like I was using less energy to move around." ... "The Fins performed very well. I was able to move and glide with less effort than my Avanti Quattros."
Diver F - "I like the fins a lot, especially powerful with flutter kick which I tend not to use much but fighting a current these fins would be really awesome. I was able to do a reverse frog kick also which is impressive as I have only been able to do that with Jet fins up until now."
Diver G (Disabled Veteran)- "I have never glided through the water with such ease." ... "Now when I get out the water I don't feel like I need a lower back massage or pain medicine."
*
With Truefin, the allowed articulation of the artificial spines and consequently blade flex during flutter kicking is generally similar regardless whether the user is kicking slowly or rapidly, and thrust is proportional to the kicking frequency and foot range of motion. At very slow kicking frequencies with Truefin the user will notice that they are not wasting energy to cause solid fin rails (from spineless fins and/or fins with hinged or pivoting blades causing inefficient flow separation) to form an angle of blade attack, which results in a relatively easier kick with Truefin where most of the user’s energy is directly expended to generate thrust with laminar flow, and as the user kicks at increasing frequencies with Truefin thrust increases in a linear manner without limit and simply depends on how fast the user can kick the fins.
An anecdotal observation to be noted while comparing performance of Truefin versus other fins recently tested, is that if a user treads water while wearing Truefin, then he/she is generally able to tread water while maintaining his/her head higher above the water surface as compared to traditional fins. This generally indicates (and as supported by machine test data) that for a given amount of physical exertion a user would be expected to tread higher with Truefin, and therefore one may infer that less air may be consumed at a given height above water while treading water with Truefin as compared to other fins. Such air consumption test results while treading water have not been performed.
IMAGE BELOW AUTOMATICALLY EDITED FROM TWO PHOTOGRAPHS DURING SIMILAR EXERTION LEVEL
Photographs automatically edited by Photoshop/Filter/Stylize/Find Edges tool
TRUEFIN (left) - STIFF TECHNICAL FIN (right)

Prior Research
As further background regarding the history and research of traditional swim fins, over the past few decades various studies have been performed and general conclusions regarding fin efficiency have been offered. For example, in a first case, Zamporo et al. tested fins, during attempts to determine efficiency of operation, as discussed in: 'How Fins Affect the Economy and Efficiency of Human Swimming (The Journal of Experimental Biology, 2002, by Zamparo, Pendergast, Termin and Minetti),
where it was stated "large, rigid fins are energetically demanding but improve the maximum attainable speed, whereas flexible fins improve the economy of swimming at 'submaximal cruising' speeds" (Lewis and Lorch, 1979; McMurray, 1977; Pendergast et al., 1996). Continuing, Zamparo et al. indicated that during "submaximal cruising" kicking speeds and low thrust situations while swimming underwater, a traditional flexible fin will perform very well. Truefin is as flexible (up to a predetermined angle of attack) as the traditional flexible fins Zamparo was referring to, and therefore Truefin may be considered to have "economy of swimming" at slow "submaximal cruising" speeds.
In other research regarding fins (Bergmann, Iollo and Mittal, year 2014 in: Influence of Caudal Fin Rigidity On Swimmer propulsion Efficiency), found that “The model shows that optimal efficiency is obtained for an intermediate flexibility of the caudal fin and that neither excessive rigidity nor compliance are conductive to efficient propulsion.”
https://hal.inria.fr/hal-00945912/document
The Bergmann research was limited to computational models only which “...couples a penalization method based Navier-Stokes solver with a simple model of flow induced deformation and self-propelled motion at an intermediate Reynolds number of about 1000.” Bergmann concluded (without having considered the inclusion of Truefin artificial spines which enforce a bending limit of a flexible blade) that: “We observe that rigid caudal fins lead to excessive lateral forces that increase power consumption without generating thrust, whereas highly flexible caudal fins produce negative thrust during significant portions of the stroke. These results may lead to significant improvements in the design of underwater robots and suggest bioinspired designs for flexible fin propulsors.” In summary, Bergmann simply concluded that the best overall performing fin (prior art) is one of medium stiffness, which is currently the most popular type of swim fin in use today, and generally swim fins having “intermediate flexibility” perform similarly yet with distinctions between appearance and comfort level of the foot pocket.
In addition to Truefin exhibiting rigid characteristics, Truefin is also considered to be highly flexible, however the “negative thrust during significant portions of the stroke” does not occur with Truefin because the Truefin blade will not collapse during Bergmann's computational analysis for when Bergmann's fin becomes highly flexible and the optimum angle of attack is exceeded. In the Bergmann model, “rigid caudal fins lead to excessive lateral forces that increase power consumption without generating thrust, whereas highly flexible caudal fins produces negative thrust during significant portions of the stroke”. Truefin, as well as a traditional flexible fin, may include the use of natural rubber or low durometer Monprene for example, where Truefin is flexible (injection molded Monprene 72 Shore A) and there is less likelihood for muscle cramps to occur during low propulsion effort. At low propulsion efforts or low kicking frequencies the optimum blade angle of attack is only possible with flexible traditional fins, and the optimum 'blade angle of attack' always occurs with Truefin.
It is interesting that the bending or blade flexing characteristics of Truefin may have been vaguely speculated to be a preferred characteristic of a foot fin blade, where Pendergast et al. wrote: "Swimming with a rigid fin in the down stroke and a flexible fin in the up stroke may be advantageous; however this type of fin was not available for testing". (UHM 2004, Vol 30, No. 1 - Evaluation of Fins Used In Underwater Swimming, page 69 by Pendergast, Mollendorf, Logue, and Samimy). During the time period Pendergast performed fin tests, Truefin had not been invented, and Truefin may have been considered "advantageous” by Pendergast because the artificial spines of Truefin are rigid at the optimum angle of attack in the downward power stroke, and highly flexible toward an optimum angle of attack in the upward return stroke. Furthermore, typically during a flutter kick a swim fin blade does not fully flex in the 'toe up' direction during the return stroke (because the user lacks sufficient strength), but rather during the return kick the blade becomes parallel to the streamline of the water flow as the user moves forward, and therefore Pendergast may have considered the Truefin blade to be "flexible in the up stroke".
TRUEFIN issued U.S. patents: 9,764,192, 10,071,288, 10,226,668, 10,525,307, 11,135,480

In this regard, previous research (for example: Lighthill model / Note of the Swimming of Slender Fish. J Fluid Mechanics 1960; 10: 321-344; and Hydromechanics of Aquatic Animal Propulsion. In: Mathematical Biofluidodynamics: Society for Industrial and Applied Mathematics, 1975:11-43) [insert link] pertaining to prior art swim fins is somewhat irrelevant since the advent of Truefin, where Lighthill's research generally involves essentially all other fins on the market today, where such fins are 'spineless' and fins have fin blades supported by rails (or ribs) having flexural stiffness which may be approximated as thin elastic beams according to Euler-Bernoulli's beam theory, and Truefin departs from such prior art by introducing articulating rigid spines that lock up at predetermined angles of attack, and where the artificial spines of Truefin prevent over-flex of a highly flexible and hydrodynamically streamlined fin blade. The predetermined articulation of Truefin spines ensures the optimum 'angle of attack' at both low kicking frequencies as well as at high kicking frequencies, and consequently muscle fatigue and oxygen consumption is generally minimized at all levels of exertion. Truefin is very efficient and used by divers to extend bottom time because they are not using as much energy and generally able to move through the water with less fatigue on the legs.
As further background with regard to efficiency, and with regard to vented fins, prior research by Pendergast et al (UHM 2004, Vol 30, No. 1 - Evaluation of Fins Used In Underwater Swimming, page 69 by Pendergast, Mollendorf, Logue, and Samimy)" stated: "The use of vents, either forward or rearward facing or venturis does not improve economy as was seen in this study and previous studies (McMurray referenced below), apparently as water does not pass through the vents, thus they do not relieve the negative thrust in the recovery phase. Also, the vents would presumably 'leak' water, and hence reduce the pressure difference that results in thrust, during the power phase of the kick cycle".
Also to be noted with regard to questionable benefits of fins which have features such as vents or venturis, in a study conducted by McMurray (McMurray - Comparative Efficiencies of Conventional and Super-Swimfin Designs, Human Factors 1977; 19:495-501) [insert link] where five fins in 1977 were tested: Turbofin, Scubamaster, Venturi, Spoiler, and Otarie, "The vents in the Scubamaster would allow a small portion of the water to pass through the fin unobstructed and thus decrease the effort placed on the Achilles tendon and hamstrings. It would seem that the venturi design of the Spoilers does not improve their performance as much as the vented design. This is somewhat substantiated by one trial in which the venturi of the Spoiler Fin was taped over and the oxygen consumption test repeated. No apparent difference in oxygen consumption were noted between this trial and the normal trial using the Spoilers [12.29 vs. 11.63 ml O2/kg min-1, respectively]". Furthermore, McMurray continues: "Trials using Venturi Fins were not significantly different in mean oxygen consumption than that obtained using any of the other fins. There may be two possible reasons for this failure to find a difference. First, the fins may be too flexible. Second, the value of the design of the venturi in the fin may be questionable. In order for a venturi to be effective, the fluid must enter a larger opening than that from which it exits. Therefore, the speed of the fluid moving through the tube will be increased, thus adding to the forward propulsion. The design of the Venturi Fin is such that the water enters a smaller opening than from which it exits, thus allowing for a dissipation of the forces within the tube. A similar trial to that of the Spoilers was completed in which the venturi was taped over. The results indicated no difference in oxygen uptake between the normal Venturis and the non-vented Venturis". To be fair, although Truefin has tested fins having vents which have similar cross sections of the inlet and outlet openings, Truefin has not performed a complete search of vented fins where the vent inlet has a larger opening than the vent outlet, although Truefin suspects the distinction is generally inconsequential, and such fins in any event are characterized as being spineless, and are simply either rigid or flexible with the operational shortcomings therewith.
Referring back to Pendergast et al., where Pendergast performed testing to determine VdotO2 (L/min) as a function of speed, and also performed human tests to established the maximum velocity for a number of prior art fins that can be achieved as a function of kick frequencies, note that input power to achieve a given kick frequency was not determined by Pendergast as is possible with the Truefin test apparatus where Truefin measured input power with a torque sensor and plotted simulated muscle exertion against both kicking frequency and propulsive thrust at two different kicking amplitudes (27 inch and 36 inch “swept blade tip”). Furthermore, as previously indicated, the fins tested by Pendergast had fin blade deflections which behaved as simple cantilevered elastic beams, and as such the results are generally not applicable with respect to Truefin which has a flexible predetermined blade 'angle of attack' supported primarily by (rigidly) articulated artificial spines. Testing VdotO2 is rather involved, and at slow speeds, as Pendergast noted, VdotO2 may be effected by divers "consciously or unconsciously" altering "their ventilation independently of their VdotO2". For this reason, the Truefin machine tests correlating input power with both kicking frequency and fin thrust may be considered objective tests at all levels of thrust while omitting human interaction.
https://www.researchgate.net/publication/10677199_Evaluation_of_fins_used_in_underwater_swimming
With regard to split fins, Pendergast et al. stated: After "the split fin's split was duct taped closed for one trial" and Pendergast et al. continued: "The longitudinal splits in the Apollo fin do not appear to improve thrust nor did they lower VdotO2, thus it is reasonable to speculate that the water either leaked over the splits or its backward velocity was decreased by the splits, resulting in less thrust. These fins were kicked at high frequencies, thus the relatively small amount of water accelerated rapidly leads to low efficiency." Pendergast et al. continued: "The lack of improvement in thrust or economy of fins with venturis, vents, troughs, etc. would be expected from the Lighthill model (Lighthill referenced below) as they would not increase the velocity of water down the fin, and in fact may decrease it, thus leading to lower thrust during the power phase." Pendergast et al. continued on (page 66): "The Apollo fin possesses the lowest Froude efficiency, probably due to the split in the fin's blade. The split allows water to 'pass through' it instead of having the water pass over the surface to produce the desired pressure gradient between the attacking and leeward surfaces. The Apollo (taped) and the Quattro fins each have Froude efficiencies well above 60%. The common characteristic between these two configurations is that both have flanges along the lateral edges of the blade to direct flow to the fin tip which acts as dykes to channel the flow along the fin's surface and ultimately being ejected from the TE.” It may be noted that Pendergast et al. may have been performing the wrong kick style with split fins, where many users have found acceptable performance of split fins when flutter kicking at high frequencies with short strokes, and where the full leg of the user is not utilized and the user kicks only by flexing one's ankle, or knee and ankle. Note that the Truefin test apparatus simulates full leg flutter kicking from the user's hip, so Truefin machine efficiency test results while kicking split fins may also not be optimally representing split fins, although it should be added that a shorter kick at higher frequencies may benefit all fins styles, including Truefin. Brand B in the machine test comparisons INNOVATION/COMPARISONS (PDF) was a very high quality cleft or split fin design, and several other split fin designs were tested but because of low performance such test results have not been documented as of this date (9/2021). Future Truefin machine tests may plot efficiency as a function of a wider range of foot movement (Truefin tests are conducted at both 27 inches and 36 inches of swept blade tip distance) while ignoring the change in dynamic drag on a scuba diver as the range of foot movement is adjusted. In order to factor in drag of a diver, a test apparatus similar to the HERMES test equipment would be required, which includes a modification where an object simulating the projected area of a scuba diver is secured to the underwater portion of the HERMES moving carriage. (see Testing).
Truefin Hydrodynamic Refinements
Gen 1, Gen 2, Gen 3, and Gen 4

ABOVE: Truefin quickly abandoned the use of splits and vents after this Truefin Generation 1 prototype. Gen1 incorporated a modification of a previously designed implantable spinal stabilization apparatus by an affiliated company (US 10,702,312 and others pending).

ABOVE: Paddle blade, lunate tail, 'full surround' rigid chassis, foot pocket having an extended rigid heel support. and nonmetallic articulated spines introduced with this Truefin Generation 2 prototype.

ABOVE: Truefin Generation 3 prototype introduced a 'U' shaped chassis with overmolded heel strap posts, improved paddle blade efficiency, and divergently curved pass core rail bands utilized with '512 spines.


ABOVE: Truefin Generation 4 is more streamlined than Generation 3, and introduced '412 spines while increasing the injection molded 'toe down' Monprene profile of the blade from seven degrees (7°) to twelve degrees (12°). Ventilation holes of the foot pocket were changed to a circular array of slots at an angled toe wall in order to improve local flex and increase toe room for the user.
Truefin has machine tested fins incorporating artificial spines used in conjunction with a split fin blade (Truefin 'Generation 1') and/or a blade having venturis or vents, and at this time a simple paddle style fin blade utilized without such features have demonstrated to have the greatest overall performance and efficiency. As an additional note with regard to the paddle style fin blade utilized with Truefin, the trailing blade edge of Truefin is configured to a slight crescent shape or what is known as a lunate tail, and Lighthill (Lighthill - Hydromechanics of Aquatic Animal Propulsion. In: Mathematical Biofluidodynamics. Philadelphia: Society for Industrial and Applied Mathematics, 1975:11-43) noted that such a shape generally offers efficiency benefits, where Lighthill stated of fish such as "tunnyfishes, albacores, wahoo, skipjacks, and bonitos": "...have caudal fins so scooped out internally as to make a V shape, the two arms of the V being 'sweptback' by an angle of 50° and 60°". Lighthill continued: "This sweepback is, however, just large enough to make the estimation of propulsive efficiency by elongated body theory a reasonable rough approximation, and that theory confirms that, when such a fin moves as a whole, the scooped-out area works (through properties of the vortex sheet that fills it) just as effectively as the rest of the tail". Lighthill continued: "It is just possible, then, that the lunate tail is a favorable form because, at convenient frequencies of oscillation for fast movement, it can especially readily shed vortex rings of approximately circular shape”.
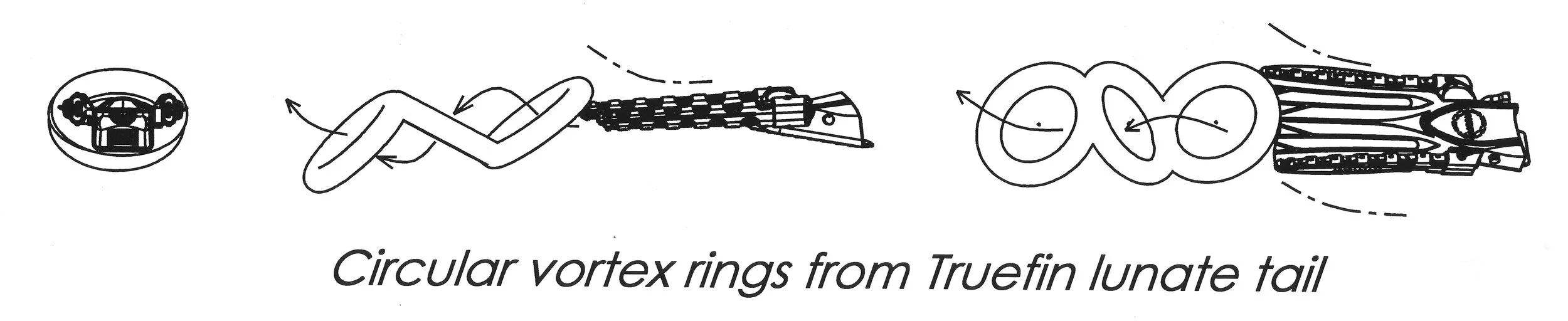

Fins of swimmer generating a vortex street composed of two oblique rows of vortex rings (von Karmann wakes)

Lighthill continued: “These characteristically carry a large amount of momentum in relation to their energy, and so rate of shedding of wake energy might be minimized as a proportion of effective power exerted, which is related to W times the maximum rate of shedding of cross-stream momentum into the wake". Using the terminology above, the artificial spines which function as the rails or ribs of Truefin are analogous with the sweptback bony 'arms' referred to by Lighthill, and the slight crescent shape of the Truefin trailing blade edge is analogous with the lunate tail or internally scooped-out caudal fin also referred to by Lighthill.

With regard to the side rails which support the blade, the present Truefin 'Generation 4' (as well as 'Generation 3') utilize a pass core design where a series of alternating bands contain the artificial spines, and where the artificial spines define a smooth curve or streamlined flex of the blade in a distributed manner along the spine axis in order that no sharp bend in the blade flex occurs during the 'angle of attack'.

ABOVE LEFT: Separated flow of a blade which is hinged, pivoted, or sharply bent results in power losses.
ABOVE RIGHT: Truefin minimizes flow separation due to the smooth curve enforced by the artificial spines.
These series of alternating pass core bands offers several very important functional advantages over the tubular rail utilized in Truefin 'Generation 1' and Truefin 'Generation 2' (such as allowing self cleaning action while expelling dirt and sand, and facilitating the molding of divergent spine supports), and by happenstance may resemble the pattern of bumps or 'tubercles' present on the leading edge of pectoral fins of humpback whales. Truefin has not been able to measure any beneficial effect on efficiency with the presence of these bands (they are not at the leading edge), and any negative effect on efficiency with the presence of these bands is infinitesimally small due the relatively small surface area of the pass core bands and the low Renolds number (Re<2300) where the water flow past the bands is laminar.
Fish can self adjust the stiffness of an active fin according to their needs, and humans must select a passive fin as a compromise over nature according to the task to be performed. Traditional swim fins may perhaps best be described as mimicking fish of the order Synentognathi (an order of fishes having spineless fins, wormlike), whereas Truefin, as an example of biomimicry, have artificial spines designed to be functional and perform optimally at all kicking frequencies, while being durable, lightweight, and without utilizing metal in order to eliminate the possibilities of corrosion.
Truefin Blade Flex Profile
Examples of popular fins 'going flat' resulting in inefficient propulsion as compared to Truefin.

ABOVE: Over-flex of popular Fins

ABOVE: Truefin

ABOVE: Actual photograph of a $230+ spineless fin collapsing while trying to avoid a shark. Very little thrust is experienced after the fin blade has collapsed. Photograph automatically edited with Photoshop version 5.0: filter/stylize/find edges and image/adjust/invert
Three Dimensional Blade Scooping
Truefin is designed to allow the blade to flex minimally and in a predetermined optimum manner in three dimensions during kicking. Excessive blade scooping of traditional spineless fins reduces efficiency and thrust.
BELOW: Video showing blade scooping while flutter kicking.
The optimal amount of 'blade scooping' while under load is achieved by designing the artificial spines to articulate approximately five degrees (10° inclusive angle) laterally toward the blade center while the angle of attack is rigidly enforced.

This scooping or cupping action focuses the propulsive flow stream rearward in a more direct and efficient manner, with less water spilling over the sides of the fin. Note that when Truefin is at rest or relaxed, the blade lies in a flat plane and the spines also lie in that same flat plane while being laterally divergent, however as the blade scoops to a concave shape each of the spines laterally articulate in a convergent manner approximately five degrees (5° or 10° inclusive) while the blade flexes down sixty degrees (60°), thus allowing 3D blade cupping or scooping during the kicking event. Based upon research by Lighthill (Mathematical Biofluiddynamics, Lighthill-ISBN 0-89871-014-6, 1975, page 99), the magnitude of 3D scooping should be held to a minimum, where Lighthill states "...good thrust and good efficiency would best be achieved if the axis of yaw were close to the trailing edge of each section. This requires that the trailing edge as a whole stretch almost straight along the axis of yaw". Lighthill continues "Any bowing of the trailing edge should be small by comparison." A reasonable compromise is thought to be achieved with Truefin, which is only possible because the artificial spines enable predetermined lateral constraints to be placed upon the blade (or fin rails) when the face of the blade is subjected to water pressure. Traditional scuba and snorkel fins, having elastic rails, are not able to enforce predetermined lateral constraints at the fin rails, and in some instances have excessive blade scooping under load which reduces efficiency and also reduces the projected area of the blade during thrust.
With regard to 3D blade scooping, an interesting event or phenomena occurred on early prototypes of Truefin as the blade was flexed underwater, where a three dimensional blade kink formed which was focused at a laterally centered point relatively close to the foot pocket ventilation holes, and this phenomena was due to the intentionally rigid ten degree (10°) lateral inclusive articulation angle limit of the artificial spines referred to above. Traditional fins having elastic rails do not have this kinking issue because the traditional fin simply distorts overall while flexing which prevents a 3d blade kink from being formed. In order to resolve this issue, surface features such as fin rays were added to the blade, and a circular array of ventilation holes were added to an angled toe wall which allow the blade region adjacent to the toe vents to more readily flex and eliminate 3d blade kinking.


Optional O-ring kit
BELOW: Truefin is evaluating whether some divers may prefer to install elastomeric elements at the vertebrae, which may involve an O-ring kit being made available for purchase, and where installation occurs at one or more vertebra, including at (unillustrated) base vertebra part # 10000. A consensus has not been reached in this regard.

General Note
When comparing Truefin to traditional (spineless) fins on the market, it is acknowledged that it is possible that the efficiency of a fin may compare similar to Truefin during a flutter kick as long as the fin blade is at the optimum angle of attack. Traditional fins generally achieve the optimum blade angle of attack during a flutter kick only at a single kick frequency, whereas Truefin generally achieves the optimum blade angle of attack at all kicking frequencies. Also note that the blade flex characteristics of Truefin are unaffected by water temperature, while the blade flex characteristics of traditional rubber or plastic fins can change depending on the water temperature, where for example the rails and blades of traditional fins may become stiffer in cold water. During frog kicking, only Truefin or a very stiff technical fin performs satisfactorily.

AREA OF STUDY:

AREA OF STUDY: Water propulsion efficiency of propellers, versus oscillating fins, versus paddle fins having artificial spines.
Regarding propulsion devices for underwater vehicles, oscillating fins have been found by MIT to have achieved an efficiency of 87% versus 70% for propeller propulsion. Note that propellers have an inherent efficiency disadvantage because moving a small mass of water rapidly is less efficient than moving a large mass of water slowly. What is not known is the efficiency of paddle style fins (such as scuba foot fins) having articulating artificial spines while using similar efficiency test parameters. An argument could be made that paddle style fins having artificial spines which articulate (having jointed segments) about an axis parallel to the main pivot axis may be more efficient than oscillating fins which flex about an axis perpendicular to the main pivot axis - because in this specific comparison the swept tip of paddle fins (without having inefficient self dampening rails and an elastic hysteresis) occurs at a first given maximum distance from its parallel main rotational axis, and may provide more efficient propulsion as compared to oscillating fins which have a flexible angle of attack occurring along a range of distances from zero to a second given maximum distance from its perpendicular main rotational axis.
From US 11,192,620 B1 :
Pedal operated propulsion apparatus, such as a foot operated paddle boat described in U.S. Pat. No. 3,095,850, are known in the art. Other pedal operated means linking rotatable pedals to a propeller have been proposed. Some have looked to the swimming motion of sea creatures to design mechanically powered propulsion systems. Generally speaking, the swimming behavior of sea creatures may be classified into two distinct modes of motion: middle fin motion or median and paired fin (MPF) mode and tail fin or body and-caudal fin (BCF) mode, based upon the body structures involved in thrust production. Within each of these classifications, there are numerous swimming modes along a spectrum of behaviors from purely undulatory to entirely oscillatory modes. In undulatory swimming modes thrust is produced by wave-like movements of the propulsive structure (usually a fin or the whole body). Oscillatory modes, on the other hand, are characterized by thrust production from a swiveling of the propulsive structure at the attachment point without any wave-like motion. A penguin or a turtle, for example, may be considered to have movements generally consistent with an oscillatory mode of propulsion.
In 1997, Massachusetts Institute of Technology (MIT) researchers reported that a propulsion system that utilized two oscillating blades of MPF mode produced thrust by sweeping back and forth in opposite directions had achieved efficiencies of 87%, compared to 70% efficiencies for conventional watercraft. A 12-foot scale model of the MIT Proteus “penguin boat” was capable of moving as fast as a conventional propeller driven watercraft. Another MIT propulsion system referred to as a “Robotuna,” utilized a tail in BCF mode propulsion patterned after a blue fin tuna, achieved efficiencies of 85%. Based upon limited studies, higher efficiencies of 87% (and by some reports 90-95% efficiency) may be possible with oscillatory MPF mode propulsion that may enable relatively long distances of human powered propulsion being achieved both on and under the water surface.
SUMMARY of the ‘620 patent: A watercraft propulsion apparatus includes an eccentric crank assembly operatively connected to a pair of fins adapted to sweep back and forth in a generally transverse direction relative to a longitudinal axis of the watercraft. The fins may be rotatable about a longitudinal shaft to the bottom of the hull of the watercraft. A drive linkage assembly operatively connecting the eccentric crank assembly to the pair of fins imparts a torque force to oscillate the pair of fins. The oscillating fins provide a propulsive force to propel the watercraft longitudinally forward during both oscillating directions of the fins as they sweep back and forth.
End of AREA OF STUDY